|
TOLVA
|
 |
Detector (S) Detertor (I) |
||
|
|
|
| Este sistema consiste en una tolva, la cual incorpora dos motores (M1 y M2) en la parte inferior y dos sensores en las partes inferior y superior fig. 1 |
|
TOLVA
|
|
Detector (S) Detertor (I) |
||
|
| El funcionamiento del sistema es el siguiente:
Cuando el nivel de café se encuentre entre (S) e (I) solo debe funcionar uno de los motores, de tal forma que cada vez que se ponga en marcha uno de ellos lo haga aquel que estaba parado cuando el otro trabajaba. Si el nivel sobrepasa el detector (S) funcionarán los 2 motores, mientras que si no sobrepasa el detector (I), se deben de parar ambos. Inicialmente el molino estará lleno de cafe. Diseñar el sistema de control mediante
biestables tipo D y los dispositivos lógicos necesarios.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
SOLUCION:
A continuaci6n se especifica el sistema de control del molino mediante tabla de estados. Después se realizará el sistema mediante biestables tipo D y dispositivos l6gicos. Estados del sistema. 1. Sobrepasa (S) habiendo funcionado primero M2.
Tabla de estados
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Razonamiento de la tabla de estados:
Teniendo en cuenta que (S)=0 significa que el nivel de café está por debajo del detector (S) y que (S)=1 que lo ha sobrepasado; Idem con el detector (I); y que no puede darse el caso que si (S)=1 el detector (I) puede valer 0, empezaremos por explicar el estado a El estado a nos dice que la tolva está
llena de café (caso inicial que se nos indica en el enunciado del
problema) por lo tanto el nivel de café sobrepasará los detectores
(I) y (S) y por tanto diremos que (S)=1 y (I)=1, en este estado deberán
estar en marcha los dos motores => M1=1, M2=1
Ahora podemos simplicar la tabla anterior y llegamos a la siguiente:
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Vemos pues que en realidad tenemos 4 estados, por
lo que podremos determinarlos con 2 biestables tipo D ya que 22
= 4
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Procederemos ahora a estudiar la tabla de los biestables
teniendo en cuenta que si A es el estado del biestable A; A' será
el estado siguiente del biestable A.
y que DA es la entrada del biestable A cuya tabla de transiciones posibles es:
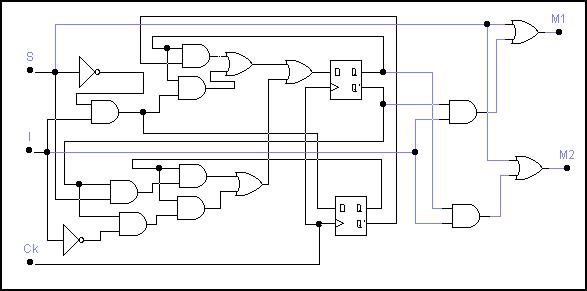
Intentaré explicar los ceros y unos puestos en esta última tabla para esta situación. Observar que en la linea en que la situación es 2 => (S)=0 y (I)=1 y el estado asignado (a f) es aquel en que los biestables valen A=0 y B=0, pero como dicha situación no es estable tenderá, como ya hemos indicado, a la situación estable [2], en que los biestables valen A=0 y B=1, por lo que en esa línea de la tabla hemos puesto A'=0 y B'=1.Los motores deberán estar M1=1 y M2=0. En la línea en que la situación es [2] => (S)=0 y (I)=1 y el estado asignado es b y mientras no hayan cambios de (S) e (I) seguiremos estando en la situación estable [2] en la que A=0 y B=1, por lo que A'=0 y B'=1 con los motores M1=1 y M2=0. El paso siguiente es calcular la combinación lógica para las entradas DA y DB de nuestros biestables, en función de los sensores (S), (I) y el estado de dichos biestables A y B,para ello usaremos las tablas de Karnaugh. Para la entrada DA :
DA = a ê + û i a + u â e + î â e Para la entrada DB :
Nos falta por ver la señal combinacional
de cada motor:
Tabla para el Motor M2
Llamando nuevamente a A = a
B = e I = i S = u el circuito podría
ser :
|
|
|
|
|
|